ソーラーたわしロボット
電動マッサージ機を使ったロボットの話が話題だから昔イベントで使ったやつの記事書いて、と言われたので資料を見て思い出しながら書き書き。
歯ブラシの先端に振動モーターを取り付けた「歯ブラシロボット」は時々工作されているようだが、その電源として太陽電池を使って作ったのが図1のソーラーたわしロボット。

用意するものは図2のようなアクリルたわし、太陽電池、振動モーター、PPシート(土台)。




太陽電池は秋月で昔買ったもので、電圧はそれほどでなくてもよいので電流がとれるもの。振動モーターはLinkmanのだったと思う。
たわしはパームたわしだと毛が密集しすぎてうまく動かなかったので、少し薄毛のアクリルたわしにしている。
作り方は、まず図3のようにアクリルたわしにモーターを載せる土台となるPPシートを固定するために上側の毛をカットする。

次に、図4のように太陽電池に振動モーターをはんだ付けする。

そして、両面テープを振動モーターの上下に貼り、図5、図6のように太陽電池と土台で挟み込むようにする(おもりの回転を邪魔しなければホットボンドでもいいかも)。


さらに土台の下部に両面テープを貼り、図3のたわしのカットしたところに接着すれば図1のソーラーたわしロボットが完成する。
(ホットボンドで接着する場合は、アクリルたわしの毛がグルーガンに溶けてくっつかないように気を付けたほうがいいかもしれない。)
昔使った部品は今は購入ができなくなっていたりするので、電圧電流等の条件を整理しておきたい。
バーサライタづくり
目の残像効果を利用した表示装置がバーサライタ。
1列のLEDアレイ(ストリング?)を振ることで文字を浮かび上がらせる。
基板は図1のような感じ。

出力ポートに抵抗とLEDをつないでいるだけ。
元ネタはスタパ齋藤、船田戦闘機:武蔵野電波のブレッドボーダーズかな?(もらった資料のスケッチの1行でgoogle検索してみた)
工夫した点としてはパソコンで扱う文字(フォント)を点(ドット)で表現したビットマップフォントである東雲フォントを活用しているところ。
好きな文字列を電光掲示板に表示するには文字をLEDの点灯/消灯で表現する必要がある。このためには、文字を N行N列のマスに分解しないといけないのだが、手書きで書くのは面倒なのでビットマップフォントを利用する。
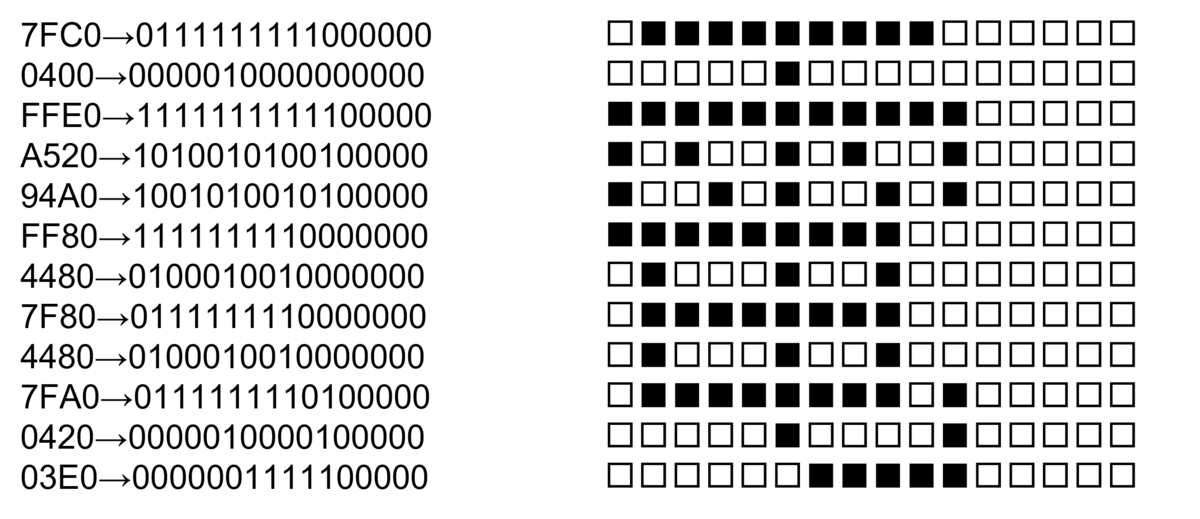
http://openlab.ring.gr.jp/efont/unicode/ のunicodeに変換された東雲フォントの文字は、96FB:7FC00400FFE0A52094A0FF8044807F8044807FA0042003E0 といったデータで表されている(図2)。

これを0と1のビット列と、文字をドットであらわしたものが図3。
このバーサライタはだいぶ昔に作られたものだったので、テキストをビット列に変換するために別途htmlファイル(javascript)を用意していた。
つまり、htmlファイルのテキストエリアに入力した文字列を1文字ごとにunicodeに変換し、4行ごとにビット列に再度変換し、テキストボックスにビット列を出力する。
これをArduinoのスケッチに貼り付けてArduinoに書き込む、といった流れ。
(今やるんだったらESP32を使うんだろうな)
出来上がりは図4。

おしまい。
メカ・フグの赤外線リモコン化
タミヤの魚型ロボットのおもちゃ「メカ・フグ」はリンク機構で尾びれ(ラダー)を動かし水上を進む。
スイッチを入れるとゆらゆらと前のほうに進むが、進むだけなのでリモートコントロールしたい、ということで、鈴木美朗志:「PIC&C言語でつくる赤外線リモコン」を参考に赤外線リモコン化しよう、というもの(を昔作った、ということで資料を少しもらって書いてる)。
主な部品は次の通り。
・送信機と受信機に使ったPICマイコンはPIC16F648A
・受信機の赤外線受光モジュールは、OSRB38C9AA
・送信機の赤外線LEDにはOSI5FU5111C-40
送信機の回路は図1の通り。
メカ・フグの電池は単3電池一本なので昇圧ICのHT7733Aで3.3Vまで昇圧してPICマイコンの電源にしている。
また、モーターはメカ・フグのものを使っているので、モーターから電池のマイナス端子に帰ってくる線をトランジスタのコレクタにつなげたりしている。

これもイベント用に作ったものなので、DIPスイッチを使って図2のようにチャンネルを切り替えて多人数で遊べるようにしている。

送信機の回路は図3の通り。
タクトスイッチを押している間、赤外線が出るようになっている。

メカ・フグに回路を組み込んだのが図4。

工作室に残っていたものを一つもらったが、赤外線をオンオフしてラダーをいい感じの位置で止めて旋回させて遊ぶ。
ラジコン飛行機のシングル方式みたいなもの、という話だった。
肝心のPICマイコンのプログラムは?と聞いたら説明資料は作っていなかったとのこと。
先に挙げた本の第1章を参考にして作ったはず、ということで本を借りてみたが、確かに17ページに載っている送受信データのデバイスコードは4台まで、となっている。
なので この本に載っているプログラムを少し変えれば動かせるのかな?
とりあえずおしまい。
(今の子ども向けに作り直すのであればマイコンは何がいいんだろうか?)
ピンポンブザーを早押し機に改造する
ダイソーで売っている「ピンポンブザー」を早押し機に改造する。
学生さんから「中学生向けに論理回路が学べる教材を作りたい」という相談を受けたんだけど、とさらに相談を受けた中で出てきたアイデア。
(論理回路の話ではなくなっている気がするが)
ピンポンブザーは単品でボタンを押すとブザーが鳴るもので早押し機ではないので、電磁リレーでインターロック回路を作り早押し機にする。
リレーで早押し機を作る、というのはリレーシーケンスを勉強している工業高校で製作している事例(http://www.shiko-th.ed.jp/E/kaken2019/W_4.pdf)はあるようだが、基本的なインターロック回路で実現しようとすると押釦スイッチの前後の線とランプの前後の線の計4本を回答者の方へ引っ張っていかないといけないし、参加者を増やすときにはb接点を挿入していく必要があってちょっと大変そう。
ということで図1のように電源のプラスとマイナス、信号線をわたしていくような回路を考えた。

押釦スイッチはピンポンブザーのラバースイッチ(図2)を利用するが、接点抵抗が300Ωくらいあるので図2の黄色部分のパターンのレジストを削って電線を引き出し、NPNトランジスタのベースに入れてトランジスタをオンオフすることにした。

完成というか、ブレッドボードで作成した回路が図3。AUTODESKのTinkercadで書いた……のにリレーの図を重ねて書いてるのかな?トランジスタもTinkercadだと2SC1815と足の順番が違うが図3は2SC1815にあわせて配線しているので注意。

ピンポンブザーの中は図4のように配線。スイッチの他、電源のプラスとマイナスの線も引き出してブレッドボードの回路とつなげる。

接続部分は図5みたいな感じ。3本線でつなげていけばよいのでステレオケーブルを使ってみた。

司会席には同じくダイソーの「3LEDフラッシュライトミニ」を置き、電池ボックスのマイナス端子にステレオケーブルのGND、オルタネートスイッチの基板側の線を外し、オルタネートスイッチ側にステレオケーブルのLを、線を外した基板の穴にステレオケーブルのR(通信線)を接続する(写真を撮り忘れた)。
こんな感じで仮完成。先日のオープンキャンパスで使ってもらった。
司会席に置いた3LEDフラッシュライトミニを1回押してONにする(この時LEDは光らない)と待機状態となり、ピンポンブザーを押すと、一番早く押した人の基板のLEDが点灯する。2番目以降はブザーはなるがインターロックが効いてLEDは点灯しない。
また、3LEDフラッシュライトミニのLEDも点灯するので、インターロックを解除する場合には3LEDフラッシュライトミニをもう一度押して電源を切り、もう一度押して待機状態に戻す。
おしまい。
360度動画のテスト
部室とかの360度画像を投稿したい。
youtubeにアップロードしたものを貼り付ける、というのはできそう。
1.リコーのシータで360度写真を撮影する。
2.windowsのフォトで「新しいビデオを作成」する。
3.360度写真を登録する。
4.表示時間が短いので、適当に延ばす(上の動画だと15秒)。
5.「テキスト」を選択してキャプションをつける。テキストスタイルは細則。レイアウトは左上のタイトル1にしてみた。テキストの表示時間は、最初から最後までにしている。
6.ビデオの完了、でmp4ファイルを出力する。
7.これだけだとyoutubeにアップロードしても展開した画像になり、360度動画にはならないので、「Spatial Media Metadata Injector」でメタデータを付与する。
8.youtubeにアップロードする。
といった流れ。